
DC-DC 전원 모듈
맞춤형 DC-DC 변환기 DC-DC 변환기를 탐색합니다센서 제품
RZ35A09 서보 모터 인코더 절대
세부사항
RZ35A08 서보 모터 인코더 Absolute
세부사항
RZ35D06Q 서보 모터 인코더 절대
세부사항
RZ35D06S 서보 모터 인코더 절대
세부사항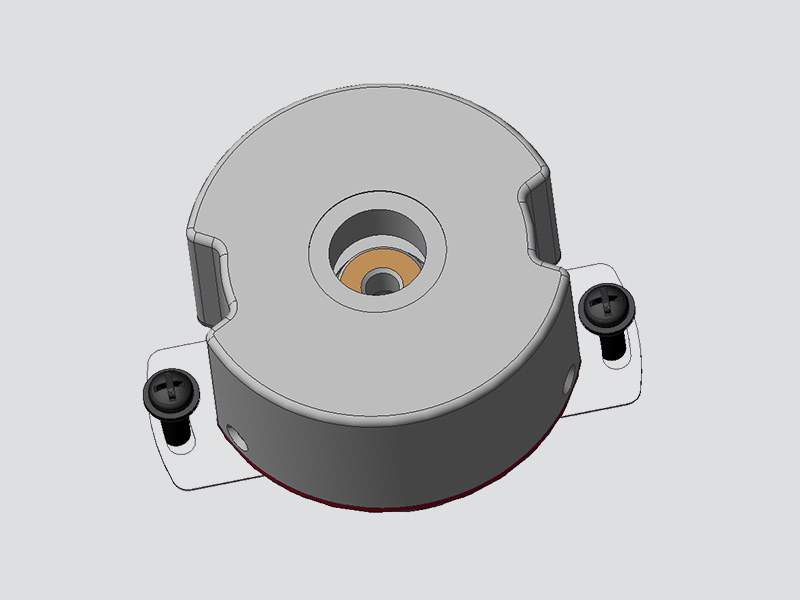
RZ4809A 서보 모터 엔코더 절대
세부사항
RZH4409A 서보 모터 인코더 Absolute
세부사항
RZL4409A 서보 모터 인코더 Absolute
세부사항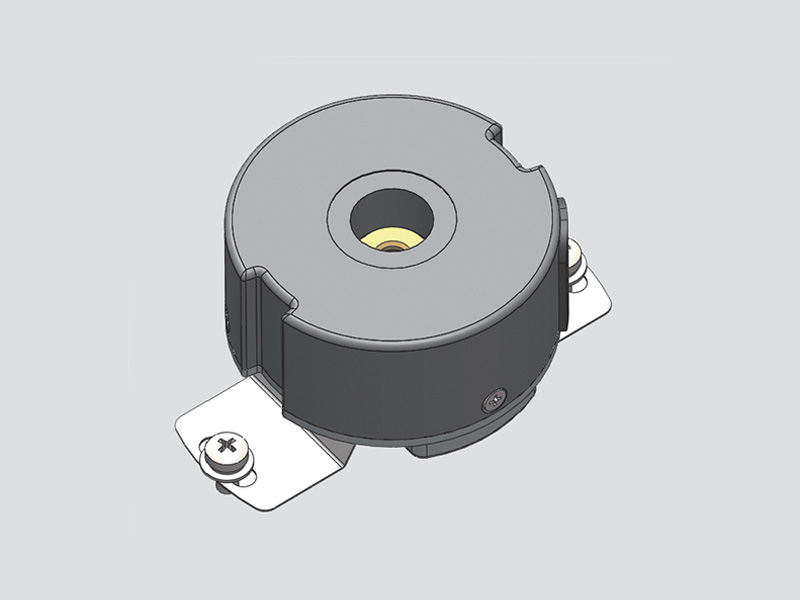
UZ4409 서보 모터 인코더 증가
세부사항
UZ4809 서보 모터 인코더 증가
세부사항
EJ Modbus 출력 변위 센서
세부사항
EP 아날로그 자기strictive Displacement Sensor
세부사항
MHA 아날로그 자기strictive Displacement Sensor
세부사항
RH(P) Profibus-DP 출력 자기 strictive Displacement Sensor
세부사항
RZ35시리즈 멀티 턴 베어링 절대 인코더
세부사항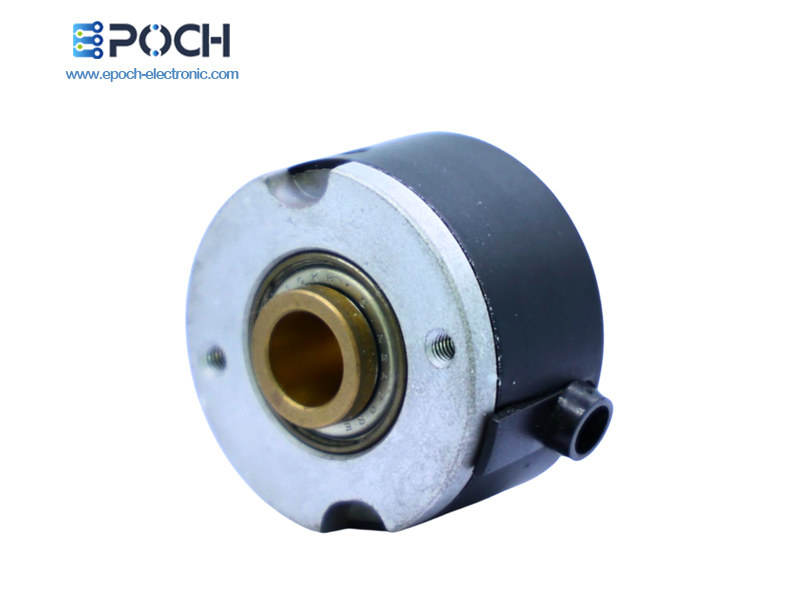
RZ35시리즈 베어링 절대 인코더 RS485인터페이스
세부사항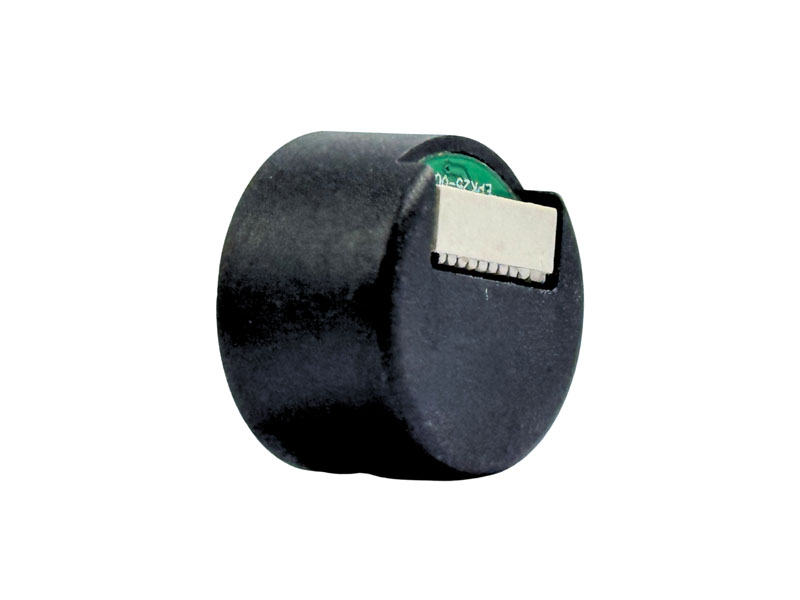
DC 모터용 RF20시리즈 소형 반사형 로터리 인코더
세부사항
SMD7015 KHz 크리스탈
세부사항
LV7050 SPXO HCSL 수정발진기
세부사항일하는 온도 | -20°C에서 +105°C |
현재 소비 | <100 mA |
배터리 전압 | 3.6 V DC |
Battery 결함 전압 | 2. 5 V |
Battery 경고 전압 | 3. V |
신호 | 차등 출력 |
공급 전압 | 단일 5V 공급 |
흥망/시간 | 약 100 ns |
절연 저항 | 50 미터 Ω |
결의안 범위 | 131072 (17 비트)~8388608 (23 비트) |
Multi-Turn 해상도 카운터 | 16 비트 (65536회전) |
Absolute Positioning 정확도 | <±50 각초 참고:구체적인 정확도는 모터 및 기계적 어셈블리 적합에 따라 다릅니다 |
반복 포지셔닝 정확성 (Repetition Positioning Accuracy) | <±3 각초 참고:구체적인 정확도는 모터와 기계식에 따라 다릅니다 맞어 셈 블리 |
배터리 전압 결함 경고 | 네 |
인터페이스 | RS485 |
통신 빈도 | ≤ 16 kHz |
전송 속도 | 2. 5 MHz |
허용 샤프트 편차입니다 | 축:±0.5 mm, 반경 방향:±0.02 mm, Dip 각도:0.1°, 축 엔드 플레이:<0.1 mm, 반경 런아웃:<0.01 mm |
작업 속도 | 최대 6000 rpm |
샤프트 지름 | 콘의 축이 Ø 9 점차:10 |
관성 모멘트 | 0.68 kg · mm ² |
로터 각가속도 (Rotor Angular Acceleration) | 전력 공급 중:≤80000 rad/s²; 배터리 전원을 사용할 때:≤4000 rad/s² |
기계적 충격 | 충격 가속:11 ms에 980 m/s²;충격은 각 방향으로 3번, 완전히 18번 실험했습니다 |
진동 저항 | 10~55Hz로 진폭 1.5mm를 유지한다 55~2000Hz 사이의 가속도는 98m/s2이다 축방향 당 XYZ 2시간, 총 6시간 |
Working 온도 범위 | -20°C에서 +105°C |
상대 습도 | ≤90% (40°C/21일, EN60068-2-78기준), 응축 없이 |
보호의 정도 | IP40 |

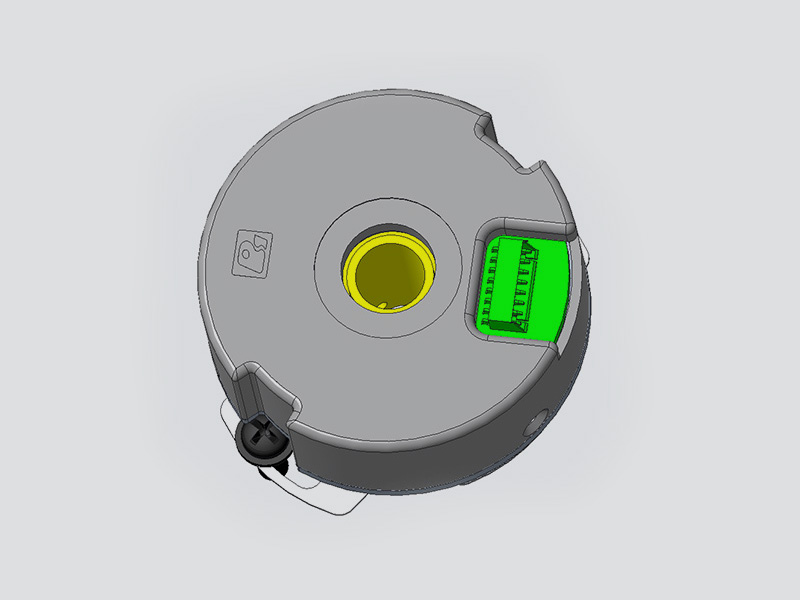
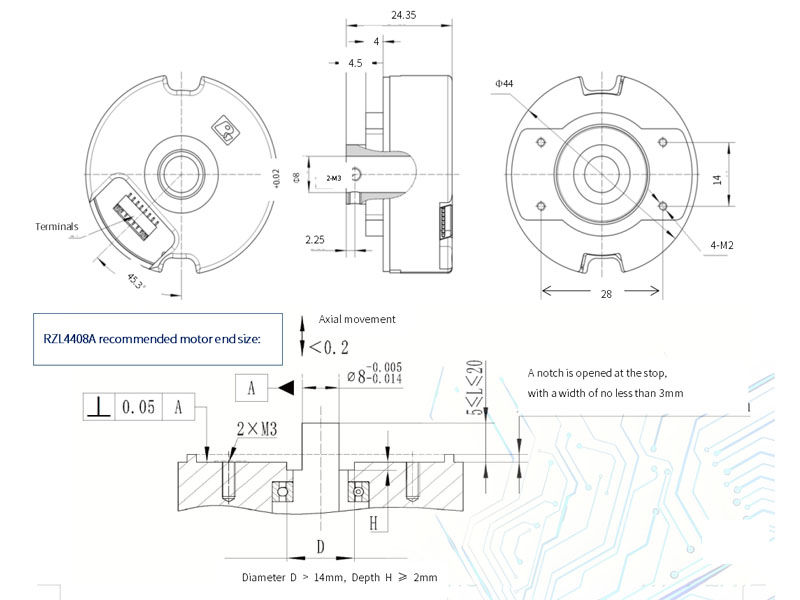
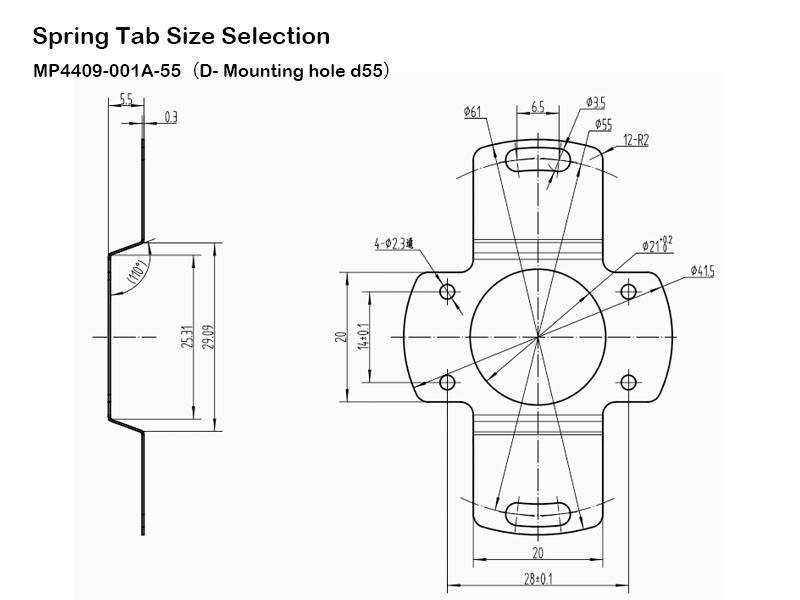
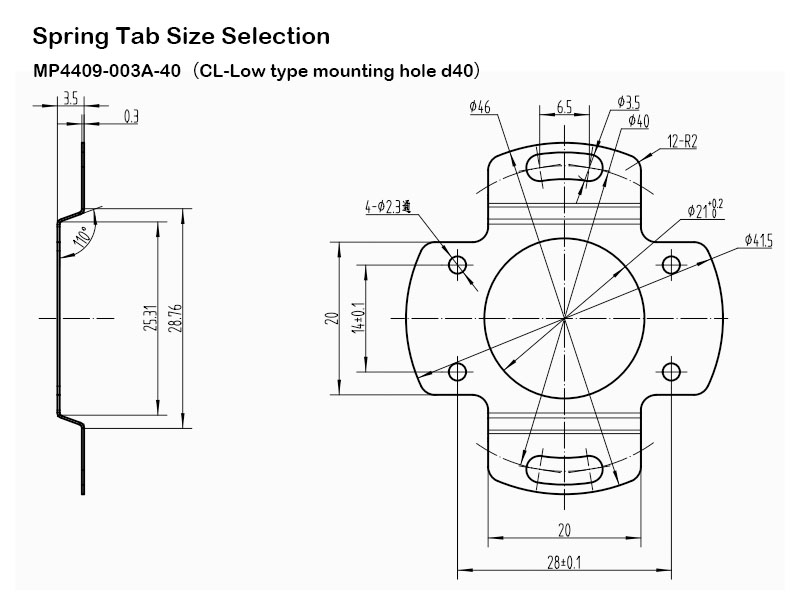
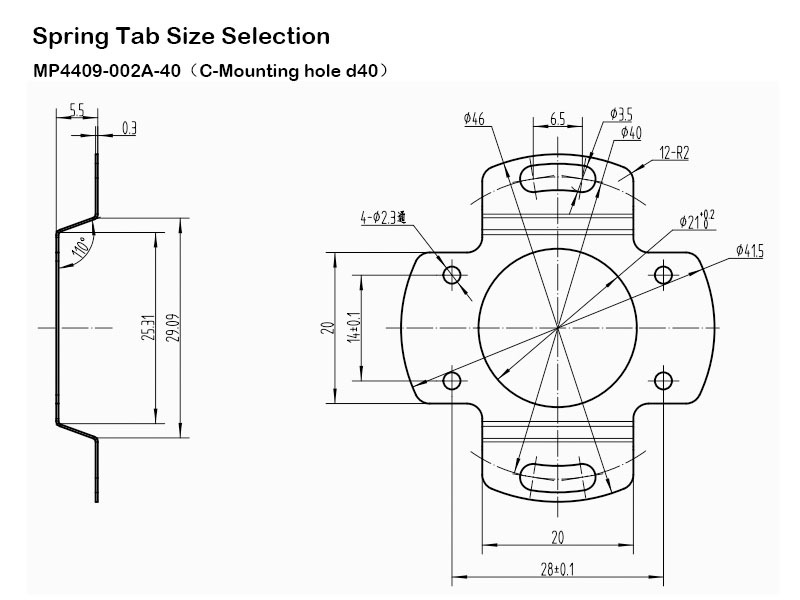
(참고:스프링 탭은 모터 끝 크기에 따라 선택해야 합니다.)



| 색이 어질 | 붉은 | 검은 | 파란색 | 노란색 | 브라운 | 흰색 | 방패 |
| 신호 | 5V | GND | 485 + | 485 − | 배터리 + | 배터리 GND | P |
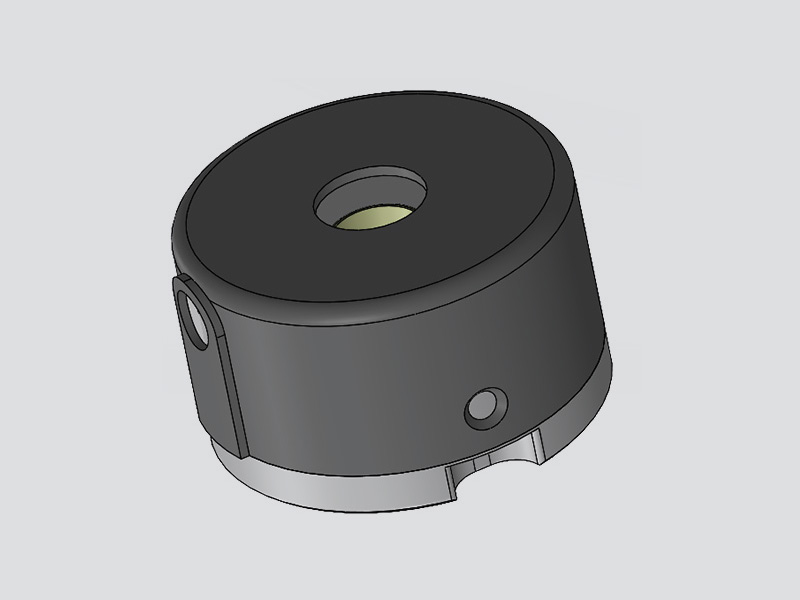
RZL4408A 절대적인 코 더 주로 서보 구동 제어 시스템에 사용됩니다.정확한 위치 및 속도 제어 장치에 필요한 피드백 정보와 보조 신호를 제공합니다.


| 항목 | 설명 | QTY/상자 | 상자 /상자 | G.W | N.W | QTY /상자 | 패키지 크기 |
| RZ44 | 절대 인코더, 외경 44mm | 10pcs | 10boxes | 0.8kgs | 0.7kgs | 100pcs | 340 180 * * 47mm |
오늘 데이터시트를 다운로드하여 모든 기술 사양을 확인하십시오.
| 부품 번호 | 인터페이스 |
치수
(mm) |
결의안 범위 | 결의안 카운터 |
통신 빈도 |
일하는 온도 |
통신 빈도 |
작업 속도 |
보호 구조 |
발자국 3D | 데이터 시트 | 샘플 |
| RZ35A08 | RS485 | Φ35mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 |  |
 |
|
| RZ35A09 | RS485 | Φ35mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZ35D06Q | RS485 | Φ35mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZ35D06S | RS485 | Φ35mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZL4408A | RS485 | Φ44mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZH4409A | RS485 | Φ44mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZL4409A | RS485 | Φ44mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZ4809A | RS485 | Φ48mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| UZ3509 | RS485 | Φ35mm | 1000-5000CPR | Single/Multi-Turn | Differential output | -20°C-+105°C | 500khz | / | IP40 | |
|
|
| UZ4408 | RS485 | Φ44mm | 1000-5000CPR | Single/Multi-Turn | Differential output | -20°C-+105°C | 500khz | / | IP40 | |
|
|
| UZ4409 | RS485 | Φ44mm | 1000-5000CPR | Single/Multi-Turn | Differential output | -20°C-+105°C | 500khz | / | IP40 | |
|
|
| UZ4809 | RS485 | Φ48mm | 1000-5000CPR | Single/Multi-Turn | Differential output | -20°C-+105°C | 500khz | / | IP40 | |
|
|
| RS972 | / | / | / | / | / | -40°C to +85°C | / | / | / | |
|
|
| RS970 | / | / | / | / | / | -40°C to +85°C | / | / | / | |
|
|
| RK Series | / | / | / | / | / | -20°C to +85°C | / | / | / | |
|
|
| RK Series | / | / | / | / | / | -20°C to +85°C | / | / | / | |
|
|
| RK Series | / | / | / | / | / | -20°C to +85°C | / | / | / | |
|
|
| RF28 | / | / | / | Single/Multi-Turn | / | -40 °C ~+85 °C | / | / | / | |
|
|
| RT28 | / | / | / | Single/Multi-Turn | / | -40 °C ~+85 °C | / | / | / | |
|
|
| RF20 | / | / | / | Single/Multi-Turn | / | -40 °C ~+85 °C | / | / | / | |
|
|
| RR28 | / | / | / | Single/Multi-Turn | / | -40 °C ~+85 °C | / | / | / | |
|
|
| RS5 | / | / | / | Single/Multi-Turn | / | / | / | / | / | |
|
|
| RSG35 | RS485 | / | 17-23 Bits | Single/Multi-Turn | ≤16K | -20 ℃ ~+105 ℃ | 16K | 6000rpm | IP40 | |
|
|
| RSU3506 | RS485 | / | 17-24 Bits | Single/Multi-Turn | ≤16K | -20 ℃ ~+105 ℃ | 16K | 6000rpm | IP40 | |
|
|
| MS Series | / | / | 17 Bits | Single/Multi-Turn | ≤16K | -10℃~105℃ | 16K | ≤6000rpm | / | |
|
|
| RZ44 & RZ48 | RS485 | / | 17-23 Bits | Single/Multi-Turn | ≤16K | -20 ℃ ~+105 ℃ | 16K | 6000rpm | IP40 | |
|
|
| RZ1337A | RS485 | / | 25 Bits | Single/Multi-Turn | ≤16K | -20°C-+105°C | 16K | 12000rpm | IP40 | |
|
|
| RZ7810 | RS485 | / | 23~25 Bits | Single/Multi-Turn | ≤16K | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RS Series | RS485 | / | 17~23 Bits | Single/Multi-Turn | ≤16K | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZ35 Series | RS485 | Φ35mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|
|
| RZ35 Series | RS485 | Φ35mm | 17~23 Bits | Single/Multi-Turn | Differential output | -20°C-+105°C | 16K | 6000rpm | IP40 | |
|

의료 장비의 정밀성과 신뢰성을 위해 필수적입니다

다양한 로봇 애플리케이션에서 자동화 및 효율성을 향상시킵니다

자동화 시스템의 효율성 및 신뢰성을 향상시킵니다
위치 및 속도에 대한 정확한 피드백